
راهنمای انتخاب و خرید چرخ ربات: نکات کاربردی چرخهای رباتیک

چرخ ربات یکی از مهمترین اجزای طراحی هر ربات است که نقش حیاتی در حرکت، پایداری و عملکرد کلی آن ایفا میکند. انتخاب درست نوع و مدل چرخ، تأثیر مستقیمی بر کارایی ربات و قابلیتهای آن در محیطهای مختلف دارد. از سطوح صاف و هموار گرفته تا زمینهای ناهموار و پیچیده، چرخهای مختلف میتوانند برای رباتها مزایای ویژهای به ارمغان بیاورند.
در این مقاله، به بررسی انواع چرخهای رباتیک و نکات کلیدی در انتخاب مناسبترین چرخ برای پروژههای مختلف رباتیک خواهیم پرداخت.
- چرا انتخاب چرخ ربات مناسب مهم است؟
- انواع چرخ ربات: کدام یک برای پروژه شما مناسب است؟
- نکات کلیدی در انتخاب چرخ ربات برای سطوح مختلف
- چرخهای همهجهته در رباتیک: چرا باید از آنها استفاده کنید؟
- چرخ ربات لاستیکی یا پلاستیکی؟ کدام بهتر است؟
- چرخ ربات توپی (Ball Wheels): بهترین انتخاب برای حفظ تعادل ربات
- چطور چرخ ربات را متناسب با وزن و اندازه آن انتخاب کنیم؟
- چرخهای زنجیری برای رباتهای کاوشگر: انتخابی ایدهآل برای حرکت در سطوح ناهموار
- سوالات متداول
- انتخاب هوشمندانه چرخ ربات، کلید موفقیت پروژه شما
چرا انتخاب چرخ ربات مناسب مهم است؟
انتخاب چرخ مناسب برای ربات یکی از عوامل کلیدی در طراحی و عملکرد صحیح رباتها است. چرخ ربات، به عنوان یکی از اجزای اصلی سیستم حرکتی، نقش حیاتی در حرکت، پایداری و توانایی ربات در مقابله با شرایط مختلف دارد. بسته به نوع ربات و کاربرد آن، انتخاب انواع چرخ رباتیک میتواند تاثیر زیادی در عملکرد کلی ربات بگذارد.
در انتخاب چرخ ربات باید به عواملی چون نوع سطح، وزن ربات و نیازهای خاص حرکت توجه کرد. برای مثال، اگر ربات شما قرار است در سطوح صاف حرکت کند، چرخهای ساده یا لاستیکی انتخاب مناسبی خواهند بود. این چرخها به راحتی روی سطوح هموار حرکت میکنند و چسبندگی خوبی دارند. اما اگر ربات شما باید در محیطهای ناهموار حرکت کند، استفاده از چرخهای زنجیری یا چرخهای توپی که توانایی حرکت در جهات مختلف را دارند، ضروری است.
یکی دیگر از نکات مهم در انتخاب چرخ، تاثیر آن بر سرعت و کنترل ربات است. چرخهای با سطح تماس بیشتر ممکن است باعث کاهش سرعت شوند، اما کنترل بهتری فراهم میکنند. به همین دلیل باید بین سرعت و کنترل تعادلی برقرار کرد. همچنین هماهنگی چرخها با موتور و سیستم دنده ربات نیز بسیار مهم است؛ به طوری که چرخها باید با موتورهای موجود هماهنگ باشند تا عملکرد ربات بهینه باشد.
در نهایت، انواع چرخ رباتیک در دسترس هستند که هرکدام ویژگیها و کاربردهای خاص خود را دارند. بنابراین، انتخاب صحیح چرخ برای ربات، بر اساس نیازهای پروژه و محیط، میتواند به بهبود کارایی و عملکرد ربات کمک زیادی کند.
انواع چرخ ربات: کدام یک برای پروژه شما مناسب است؟
انتخاب نوع چرخ رباتیک برای هر پروژه رباتیک از اهمیت زیادی برخوردار است. چرخ ربات، به عنوان یکی از اجزای اصلی حرکتدهنده ربات، باید متناسب با نیازهای پروژه و ویژگیهای محیطی انتخاب شود. در این بخش، انواع مختلف چرخ رباتیک را بررسی میکنیم تا شما بتوانید مناسبترین گزینه را برای پروژه خود انتخاب کنید.
یکی از انواع متداول چرخهای رباتیک، چرخهای مکانیکی ربات هستند که معمولاً برای رباتهای ساده و پروژههای آموزشی استفاده میشوند. این چرخها با ساختار ساده و قابلیت حرکت در سطوح صاف، گزینه مناسبی برای رباتهایی با کاربردهای اولیه یا سطوح راحت و هموار هستند. چرخهای مکانیکی ربات، علاوه بر اینکه هزینه مناسبی دارند، تعمیر و نگهداری آنها نیز بسیار آسان است.
اگر پروژه شما نیاز به حرکت در سطوح پیچیدهتر یا ناهموار دارد، ممکن است به چرخهای توپی یا چرخهای زنجیری نیاز داشته باشید. این چرخها میتوانند در شرایط مختلف مانند زمینهای سنگی یا گلآلود به راحتی حرکت کنند و عملکرد بهتری در مقایسه با چرخهای معمولی دارند. چرخهای توپی به دلیل طراحی خاص خود میتوانند در تمامی جهات حرکت کنند و این ویژگی آنها را برای پروژههای پیچیدهتر مناسب میکند.
در برخی موارد، رباتها نیاز دارند که سرعت بالا و کنترل دقیق را همزمان داشته باشند. برای چنین پروژههایی، چرخهای خاص با سطح تماس بالا مناسبتر خواهند بود. این چرخها ممکن است سرعت را کاهش دهند اما در عوض کنترل و پایداری بیشتری به ربات میدهند.
نکات کلیدی در انتخاب چرخ ربات برای سطوح مختلف
انتخاب چرخ ربات مناسب برای سطوح مختلف به دقت و توجه زیادی نیاز دارد. چرخ ربات به عنوان یکی از اجزای حیاتی ربات، تأثیر زیادی بر عملکرد ربات در محیطهای مختلف دارد. بسته به اینکه ربات شما در چه نوع سطحی حرکت میکند، باید چرخ مناسبی را انتخاب کنید تا حرکت روان و پایداری را تجربه کند.
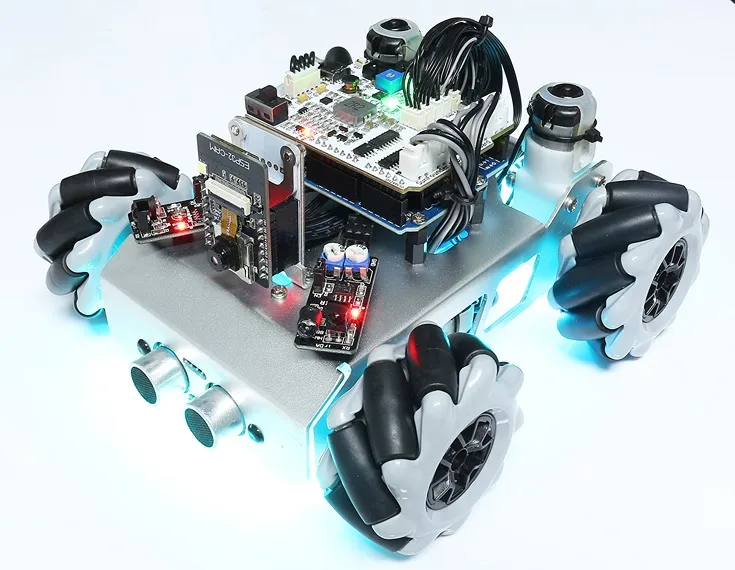
یکی از نکات کلیدی در انتخاب چرخ ربات برای سطوح مختلف، توجه به چرخهای همهجهته رباتیک است. این چرخها به دلیل طراحی خاص خود میتوانند در تمامی جهات حرکت کنند و به ربات اجازه میدهند تا به راحتی از موانع عبور کرده و در مسیرهای پیچیده حرکت کند. این ویژگی مخصوصاً در سطوحی با پیچ و خم یا موانع متنوع، بسیار مفید است. به همین دلیل، چرخهای همهجهته رباتیک برای رباتهایی که در محیطهای متغیر و چالشبرانگیز فعالیت میکنند، گزینهای ایدهآل به شمار میآیند.
برای سطوح صاف و هموار، چرخهای سادهتر و استاندارد برای رباتهای کوچک و سبک مناسبتر هستند. این چرخها معمولاً هزینه کمتری دارند و حرکت ربات را به راحتی در سطوح هموار تسهیل میکنند. اما اگر ربات شما باید در سطوح ناهموار یا غیرهموار حرکت کند، انتخاب چرخهایی با طراحی خاص و کشش بیشتر ضروری است. در این صورت، چرخهای با عاجهای بزرگتر یا چرخهای توپی میتوانند بهترین گزینه باشند.
چرخهای همهجهته در رباتیک: چرا باید از آنها استفاده کنید؟
چرخ ربات یکی از اجزای اساسی هر ربات است که تأثیر زیادی بر کارایی و عملکرد آن دارد. یکی از انواع پرکاربرد چرخها در رباتیک، چرخهای همهجهته رباتیک هستند که به دلیل ویژگیهای خاص خود، مزایای زیادی را به همراه دارند. این چرخها به ربات امکان میدهند که در تمامی جهات حرکت کند، که این ویژگی در برخی از پروژههای رباتیک به شدت ضروری است.
چرخهای همهجهته رباتیک به این صورت طراحی شدهاند که به جای حرکت در یک جهت خاص، قادر به حرکت در هر جهتی هستند. این چرخها به ربات این امکان را میدهند که به راحتی در فضاهای محدود حرکت کرده و در صورت نیاز، چرخشهای دقیقتری را انجام دهد. به همین دلیل، چرخ مناسب برای ربات در پروژههایی که نیاز به تحرک بالایی دارند، بهویژه در محیطهای پیچیده یا محدود، گزینهای ایدهآل محسوب میشود.
استفاده از این چرخها به خصوص در محیطهایی که نیاز به دقت در حرکت و جهتیابی دارند، بسیار مفید است. برای مثال، در پروژههای رباتیک که ربات باید در فضای کوچک و پیچیده حرکت کند، چرخهای همهجهته میتوانند به راحتی به ربات کمک کنند تا از موانع عبور کرده و در جهتهای مختلف بدون مشکل حرکت کند.
علاوه بر این، این چرخها میتوانند برای پروژههایی که به انعطافپذیری بالا نیاز دارند، مفید باشند. چرخ ربات از این نوع بهطور ویژه در رباتهایی که در محیطهای صنعتی، پزشکی یا حتی در کارهای تحقیقاتی به کار میروند، کاربرد دارند.
چرخ ربات لاستیکی یا پلاستیکی؟ کدام بهتر است؟
یکی از سوالات مهم در انتخاب چرخ ربات، تصمیمگیری درباره نوع مواد استفادهشده در ساخت چرخ است. در دنیای رباتیک، دو نوع چرخ اصلی که مورد توجه قرار میگیرند، چرخهای لاستیکی و پلاستیکی هستند. هر کدام از این نوع چرخها مزایا و محدودیتهایی دارند که انتخاب بهینه آنها بستگی به کاربرد چرخ در رباتها و نیازهای خاص پروژه دارد.
چرخهای لاستیکی به دلیل ویژگیهای خاص خود مانند انعطافپذیری و جذب ضربه بیشتر، در بسیاری از رباتها ترجیح داده میشوند. این نوع چرخها به ربات کمک میکنند تا بر سطوح ناهموار بهتر غلبه کند و در مسیرهای دارای اصطکاک بالا عملکرد بهتری داشته باشد. از این رو، در محیطهایی که نیاز به حرکت در سطوح غیرمستقیم و متغیر است، چرخهای لاستیکی گزینه مناسبتری به شمار میآیند.
از سوی دیگر، چرخ ربات پلاستیکی معمولاً سبکتر و مقاومتر در برابر ساییدگی است، و برای سطوح صاف و ثابت مناسبتر است. این چرخها به دلیل سبکی، مصرف انرژی کمتری دارند و برای رباتهایی که نیاز به سرعت بالا و تحرک در محیطهای کنترلشده دارند، انتخاب خوبی محسوب میشوند. همچنین، چرخهای پلاستیکی معمولاً مقرونبهصرفهتر هستند و در پروژههایی که به هزینه کمتر نیاز دارند، کاربرد دارند.
چرخ ربات توپی (Ball Wheels): بهترین انتخاب برای حفظ تعادل ربات
یکی از چالشهای اصلی در طراحی رباتها، حفظ تعادل و پایداری در حین حرکت است. چرخ ربات باید به گونهای طراحی شود که ربات قادر به حرکت روان و بدون از دست دادن تعادل باشد. در این زمینه، چرخهای ربات خودران بهویژه چرخهای توپی (Ball Wheels) به عنوان یک انتخاب مناسب برای حفظ تعادل رباتها شناخته میشوند.
چرخهای توپی معمولاً بهصورت گویهای کوچک با سطح تماس محدود طراحی میشوند که به ربات اجازه میدهند در جهات مختلف به راحتی حرکت کند. این چرخها قابلیت چرخش در تمامی جهات را دارند و از این رو برای رباتهایی که نیاز به حرکت آزادانه در تمام جهات دارند، مناسب هستند. به خصوص در رباتهای خودران که باید بتوانند به سرعت و با دقت زیاد به چرخش درآیند و مسیر خود را اصلاح کنند، چرخهای توپی عملکرد عالی از خود نشان میدهند.
یکی از ویژگیهای مهم چرخهای توپی، حفظ تعادل ربات در حین حرکت است. این نوع چرخها بهطور مؤثری فشار را روی سطح کمتری از زمین توزیع میکنند، بنابراین به ربات کمک میکنند تا در سطوح مختلف بدون از دست دادن تعادل حرکت کند. علاوه بر این، چرخهای توپی معمولاً بسیار انعطافپذیر هستند و میتوانند به راحتی از موانع کوچک عبور کنند، که این ویژگی در طراحی رباتهای خودران و دیگر رباتهای پیچیده که نیاز به دقت و تحرک دارند، اهمیت ویژهای دارد.
چطور چرخ ربات را متناسب با وزن و اندازه آن انتخاب کنیم؟
انتخاب چرخ ربات مناسب یکی از مراحل مهم در طراحی رباتها است، زیرا چرخها نقش اساسی در حرکت، پایداری و عملکرد ربات ایفا میکنند. یکی از عوامل کلیدی در این انتخاب، تطابق چرخ با وزن و اندازه ربات است. در واقع، اگر چرخهای ربات متناسب با نیازهای ربات انتخاب نشوند، ممکن است عملکرد ربات دچار اختلال شود و حتی باعث آسیب به اجزای مختلف ربات گردد.
برای انتخاب چرخ مناسب، ابتدا باید وزن ربات را در نظر بگیرید. رباتهای سنگینتر به چرخهای فلزی ربات نیاز دارند زیرا این چرخها از استحکام بیشتری برخوردارند و میتوانند فشار بیشتری را تحمل کنند. چرخهای فلزی بهویژه در رباتهای صنعتی و خودران که باید روی سطوح ناهموار حرکت کنند، عملکرد بهتری دارند و میتوانند از آسیب دیدگی ناشی از وزن زیاد جلوگیری کنند.
از سوی دیگر، برای رباتهای سبکتر، استفاده از چرخهای سبک و انعطافپذیرتر میتواند گزینه مناسبی باشد. این چرخها حرکت نرمتر و سریعتری را برای ربات فراهم میآورند. علاوه بر وزن، اندازه ربات نیز اهمیت زیادی دارد. برای رباتهای بزرگ، چرخهایی با قطر بیشتر مناسب هستند زیرا این چرخها میتوانند فشار را بهطور یکنواختتری توزیع کنند و به ربات اجازه دهند تا بر روی سطوح مختلف بهتر حرکت کند.
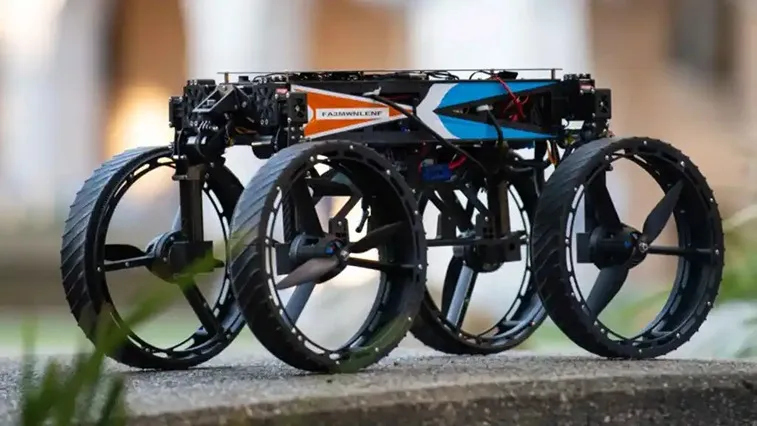
چرخهای زنجیری برای رباتهای کاوشگر: انتخابی ایدهآل برای حرکت در سطوح ناهموار
در طراحی رباتهای کاوشگر، یکی از مهمترین بخشها انتخاب چرخ ربات مناسب است. این رباتها باید قادر باشند بر سطوح ناهموار و دشوار حرکت کنند، که انتخاب چرخهای مناسب برای این نوع حرکتها از اهمیت بالایی برخوردار است. یکی از بهترین گزینهها برای این نوع رباتها، چرخهای زنجیری هستند که بهویژه در شرایط سخت و دشوار به کار میآیند.
کاربرد چرخهای زنجیری در طراحی ربات به رباتها این امکان را میدهد که فشار را بهطور یکنواختتر روی سطح توزیع کنند و با استفاده از زنجیر، اصطکاک بیشتری ایجاد کنند. این ویژگی باعث میشود که رباتها بتوانند به راحتی از موانع عبور کرده و حرکت خود را در سطوح شیبدار و زمینهای غیرهموار ادامه دهند. به همین دلیل، چرخهای زنجیری برای رباتهای کاوشگر که در محیطهای بیرونی مانند سیارات، معادن یا مناطق جنگلی به کار میروند، انتخابی ایدهآل هستند.
علاوه بر این، چرخهای زنجیری برای انتقال قدرت و تأمین کشش در محیطهای سخت بسیار کارآمد هستند. استفاده از این چرخها در رباتهای کاوشگر باعث افزایش پایداری و کاهش خطر گیر کردن ربات در موانع میشود. همچنین، این نوع چرخها میتوانند در شرایط مختلف آب و هوایی و سطحی عملکرد مناسبی داشته باشند.
در نتیجه، برای چرخ ربات هایی که باید بر سطوح ناهموار و سخت حرکت کنند، چرخهای زنجیری یکی از بهترین انتخابها به شمار میآیند. استفاده از این چرخها باعث بهبود عملکرد رباتهای کاوشگر در محیطهای چالشبرانگیز میشود و به طراحی رباتهای کاربردیتر کمک میکند.

سوالات متداول
- چرا انتخاب چرخ ربات مناسب اهمیت دارد؟ انتخاب چرخ مناسب برای ربات بسیار مهم است زیرا چرخها نقش کلیدی در حرکت و عملکرد ربات ایفا میکنند. بسته به نوع پروژه و محیط عملیاتی، باید چرخهایی با ویژگیهای خاص انتخاب شوند تا ربات بتواند بهخوبی حرکت کند، از موانع عبور کرده و تعادل خود را حفظ کند. همچنین، نوع چرخ میتواند بر مصرف انرژی، سرعت، و دقت ربات تأثیر بگذارد.
- چرخهای زنجیری برای رباتها در چه مواردی کاربرد دارند؟ چرخهای زنجیری برای رباتهایی که در سطوح ناهموار و دشوار حرکت میکنند، مناسب هستند. این چرخها میتوانند کشش بیشتری را فراهم کرده و باعث کاهش خطر گیر کردن ربات در موانع شوند. در رباتهای کاوشگر یا رباتهایی که در محیطهای بیرونی فعالیت دارند، چرخهای زنجیری بهویژه در زمینهای شنی، سنگی یا برفی کاربرد دارند.
- چگونه چرخ مناسب برای ربات خود را انتخاب کنیم؟ برای انتخاب چرخ مناسب برای ربات خود، باید عوامل مختلفی را در نظر بگیرید از جمله وزن ربات، نوع سطحی که ربات قرار است روی آن حرکت کند، و نوع حرکت مورد نیاز. برای سطوح ناهموار، چرخهای زنجیری یا چرخهای با لاستیکهای با چسبندگی بالا انتخاب مناسبی خواهند بود. همچنین، برای رباتهایی که نیاز به حرکت دقیق دارند، چرخهای ربات با ویژگیهای خاص مانند چرخهای همهجهته میتوانند مفید باشند.
- آیا چرخهای فلزی ربات به چرخهای پلاستیکی ترجیح داده میشوند؟ چرخهای فلزی ربات معمولاً برای کاربردهای صنعتی یا رباتهایی که نیاز به مقاومت بیشتری دارند، مناسبتر هستند. آنها استحکام بیشتری دارند و برای حرکت در سطوح سختتر یا کار در محیطهای سنگینتر به کار میروند. در مقابل، چرخهای پلاستیکی سبکتر و مناسبتر برای رباتهایی هستند که نیاز به حرکات سریع و دقیق دارند، مانند رباتهای آموزشی یا رباتهای کوچک.
- چرخهای ربات خودران چگونه باعث افزایش پایداری میشوند؟ چرخهای ربات خودران معمولاً طراحی شدهاند تا به ربات کمک کنند تا تعادل خود را حفظ کرده و در سطوح مختلف حرکت کند. این چرخها با قابلیتهای خاصی همچون قابلیت چرخش همهجهته و برخورداری از مکانیزمهای ویژهای که اصطکاک بهتری فراهم میآورد، میتوانند پایداری و کنترل ربات را افزایش دهند. این ویژگیها بهویژه برای رباتهای خودران که باید در محیطهای نامشخص و بدون دخالت انسان حرکت کنند، ضروری هستند.
انتخاب هوشمندانه چرخ ربات، کلید موفقیت پروژه شما
در نهایت، انتخاب چرخ ربات مناسب میتواند تفاوت زیادی در عملکرد و موفقیت پروژه رباتیک شما ایجاد کند. هر نوع چرخ ویژگیهای خاص خود را دارد که باید با توجه به نیازهای پروژه، شرایط محیطی و نوع حرکت ربات انتخاب شود. از چرخهای زنجیری برای حرکت در سطوح ناهموار گرفته تا چرخهای فلزی برای رباتهای سنگینتر، هر تصمیمی میتواند تأثیرات مهمی بر سرعت، پایداری و کارایی ربات داشته باشد. همچنین، آشنایی با کاربرد چرخهای در طراحی ربات و توجه به جزئیات فنی آنها، به شما این امکان را میدهد که بهترین عملکرد را از ربات خود استخراج کنید و در مسیر رسیدن به هدف خود، گامهای مؤثری بردارید.
انتخاب هوشمندانه چرخ ربات، بهعنوان یکی از عوامل کلیدی در موفقیت پروژههای رباتیک، میتواند تأثیر بسزایی بر عملکرد و کارایی ربات شما داشته باشد. چرخهای مناسب نهتنها به بهبود حرکت و مانورپذیری ربات کمک میکنند، بلکه بر اساس نوع سطح و محیط نیز میتوانند چسبندگی و پایداری بیشتری را فراهم کنند. با انتخاب چرخهای با کیفیت و طراحی مناسب، میتوانید از بروز مشکلات هنگام اجرای پروژه جلوگیری کرده و به نتایج بهتری دست یابید. بنابراین، با دقت و آگاهی در انتخاب چرخهای رباتیک، کلید موفقیت پروژهتان را در دست بگیرید.



